This work is aimed to study the performance of using camera as the perception system for state estimator design on mobile robots. The system pipeline operates on ROS. Main study is focused on the robustness and accuracy of feature-based pose estimation algorithm.
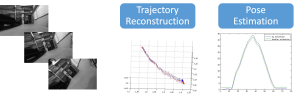
A comparison of local interest points matching and global bundle adjustment using Bundler is therefore conducted, to further study the trade-off between computation cost and estimation performance.


